半导体公司有各种类型的步进电机IC。选择驱动IC时,除了单极/双极驱动和驱动电流值等基本规格外,还有一些关键规格。
本节对向步进电机驱动 IC 发出动作指令的信号的规格进行说明。
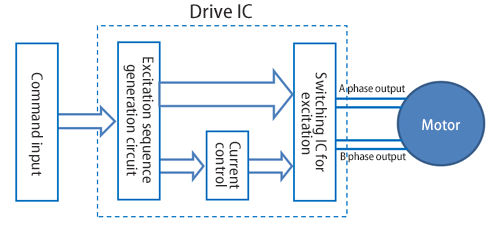
命令输入接口
 要驱动电机,需要切换电机线圈各相的励磁顺序。
要驱动电机,需要切换电机线圈各相的励磁顺序。
通过按照固定顺序切换各相电机线圈电流,切换励磁(N/S 极性),电机旋转。
(下图显示了 2-2 相励磁的示例。)
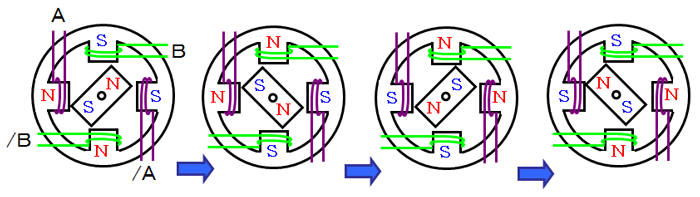
向驱动 IC 输入命令以在驱动电机时切换此励磁序列。
命令输入的典型类型
一种。时钟(=脉冲)输入类型
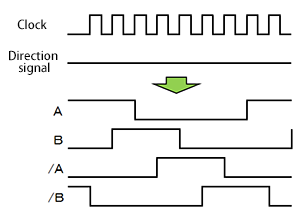 您可以使用两种类型的信号控制电机:时钟和方向。驱动 IC 将时钟和方向信号转换为内部电路中每相的励磁序列以驱动电机。
您可以使用两种类型的信号控制电机:时钟和方向。驱动 IC 将时钟和方向信号转换为内部电路中每相的励磁序列以驱动电机。
当时钟改变时,激励顺序切换。电机速度由时钟速度控制,电机旋转量由时钟数控制,电机旋转方向由方向信号的高/低控制。
在具有微步兼容驱动IC的微步驱动中,您可以只使用时钟和方向信号进行微步驱动,而无需考虑励磁序列。
| 好处 | 使用两种类型的信号轻松进行软件控制:时钟和方向。 |
|---|---|
| 缺点 | 如果时钟线布线跨越电路板,则可能会因噪声而发生故障。 滤波器可以插入驱动器的信号输入部分。 |
湾相位输入型
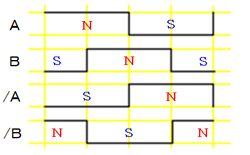
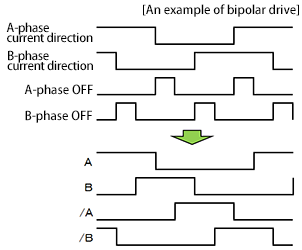 控制励磁状态的电平信号,如电流方向、励磁开/关、电机线圈各相电流比等,产生控制电机所需的励磁序列。
控制励磁状态的电平信号,如电流方向、励磁开/关、电机线圈各相电流比等,产生控制电机所需的励磁序列。
电机速度、旋转量和旋转方向由励磁序列的切换顺序和切换速度控制。
当用微步兼容驱动IC进行微步驱动时,除了下图所示的信号外,还需要几个控制电流比的信号。
| 好处 | 由于励磁时序状态由电平信号提供,因此即使存在噪声也难以误动作。 |
|---|---|
| 缺点 | 指令信号的数量根据励磁方式而增加:2-2 相励磁:2 线,1-2 相励磁:4 线,W1-2 相励磁:6 线。 此外,励磁序列必须由控制软件生成。 |
C。串行输入类型
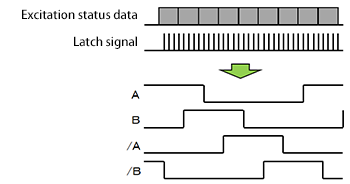 为了控制电机,使用两到三个串行通信信号将励磁序列等励磁状态数据输入到驱动IC,与相输入类似。
为了控制电机,使用两到三个串行通信信号将励磁序列等励磁状态数据输入到驱动IC,与相输入类似。
电机速度、转速和旋转方向由励磁顺序切换顺序及其切换速度控制。
使用微步兼容驱动IC进行微步驱动时,除了励磁序列外,还通过通信输入电流比数据。
| 好处 | 由于通过串行通信反复写入激励序列,因此即使放置噪声或布线很长也很难发生故障。此外,命令信号的数量少至大约两个或三个。 |
|---|---|
| 缺点 | 控制软件需要很复杂才能生成励磁序列并执行串行通信。 此外,这种类型不能以非常高的速度运行,因为它使用简单的通信。 |
*另外,部分驱动IC内置控制功能,可直接输入操作指令。
*时钟输入信号由 CPU 生成,但可能难以设置精细的时钟频率或执行平滑的速度变化
Nippon Pulse Motor 提供专用时钟(=脉冲)生成 LSI,[PCL 系列] 和 [PCD 系列] 可以管理这些详细设置。
【PCD系列】还可为相位输入生成励磁序列(2-2相和1-2相)。